AP2-6
Improvement of the Damping factor at Low Speed in Electrodynamic Suspension System for the JR Maglev
Dec.1 15:10-15:30 (Tokyo Time)
Kansai University, Department of Electrical and Electronic Engineering, Japan1
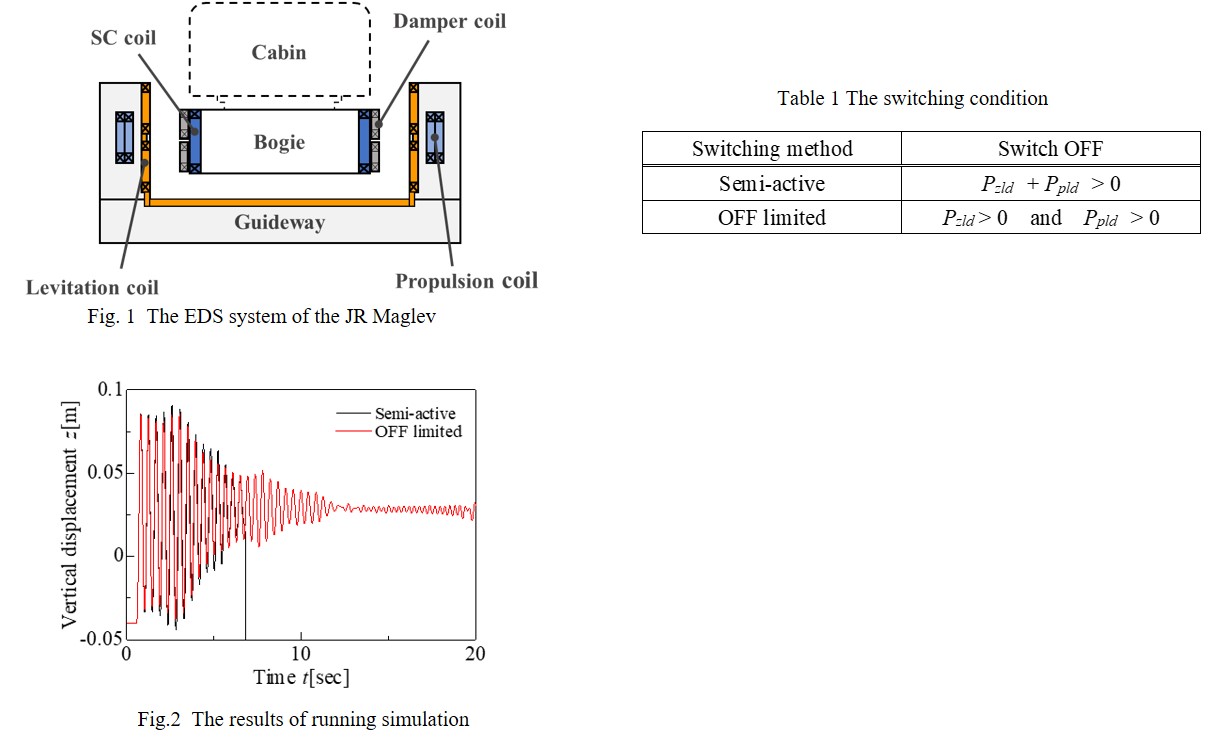
The electrodynamic suspension system (EDS) is used for levitation and guidance of the JR maglev system. The EDS system has the advantage of stable levitation without the gap control. However, damping of this EDS system is small. The additional damping system is needed. Fig.1 shows the EDS system. To improve the damping factor, the damper coils are equipped on the surface of the SC coils on the bogie. The current is induced on the damper coil and electromagnetic force is generated to decrease the oscillation of the bogie. The semi-active switching is introduced to improve the levitation stability. When the switch is ON, the damper coils are short circuited, and OFF, resistances are inserted to the circuits. The bogie generally moves at the velocity v = 120 m/sec. However, at v = 60-80 m/sec, the damping factor is small, and it is difficult to keep the levitation stability. So, the improved switching method is discussed.
In this paper, the switching method of semi-active damper system is improved. (Switching based on vertical and pitching motion) Table 1 shows the switching condition. Improved switching is more periods of switch ON than semi-active switching. So, with improved switching, the time to decrease the oscillation is longer. Running simulations when the bogie passes the displacement of the guideway are studied. The bogie moves to the running direction at v = 60 m/sec. The bogie passes the vertical displacement z = 0.07 m at t = 0.6 sec. Fig. 2 shows the results of running simulation at v = 60 m/sec and z = 0.07 m. With semi-active switching, the maximum amplitude of the oscillation is 6.1 × 10-2 m. Although the amplitude becomes smaller, the bogie loses the levitation force later. In this case, there are many periods of switch OFF, so the enough levitation force is not generated. With improved switching, the maximum amplitude is 5.6 × 10-2 m. The maximum amplitude with improved switching is a little smaller than with semi-active switching. As a result, the oscillation converges, and the bogie keeps levitation force.
With semi-active switching, there are many periods of switch OFF. So, the damping force is not enough for stable levitation, and the oscillation doesn’t converge. With improved switching, there are more periods of Switch ON than the other. So, the oscillation becomes smaller and smaller, and the bogie keeps the levitation.
Keywords: Electro-dynamic suspension , Damping , Numerical analysis , Superconducting coil